- Toyota dezvoltă tractare fără cârlig folosind principiul follow the leader.
- Vehiculul din față este condus de șofer, cel din spate urmărește automat.
- Nicio legătură fizică între vehicule; distanță inițială de circa două lungimi.
- Scenarii practice: convoi pe autostradă, reducerea oboselii și optimizarea consumului.
Toyota a anunțat recent dezvoltarea unui sistem revoluționar care permite tractarea unui vehicul fără să fie necesară o conexiune fizică prin cârlig. Această tehnologie reprezintă un pas semnificativ în domeniul conducerii autonome și ar putea schimba complet modul în care ne gândim la deplasările în convoi.
Deși proiectul este încă în faza de dezvoltare, un produs funcțional ar putea ajunge pe mașinile de serie în următorii ani. Sistemul combină tehnologia de urmărire precisă cu capacități autonome avansate, creând o soluție inovatoare pentru tractare.
Principiul de funcționare al sistemului
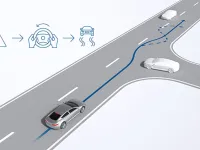
Paul Fanson, manager la Toyota Motor North America Research & Design’s Advanced Product Planning Office, explică că sistemul se bazează pe principiul “follow the leader” - urmărește liderul. Conceptul implică două componente principale:
- Vehiculul din față este condus de un șofer uman în mod normal
- Vehiculul din spate (sau remorca, rulota) urmărește și imită automat toate mișcările primului vehicul
- Nu există nicio conexiune fizică între cele două vehicule
Într-un video demonstrativ publicat de Autoblog, Toyota a testat conceptul pe un circuit special amenajat, arătând cum funcționează sistemul în condiții controlate.
Parametrii tehnici actuali
În versiunea actuală de testare, sistemul prezintă următoarele caracteristici:
Distanța de operare: Momentan, vehiculul tractat menține o distanță echivalentă cu aproximativ două lungimi de mașină față de vehiculul lider. Această distanță considerabilă este necesară în faza de testare pentru a asigura siguranța.
Planuri de îmbunătățire: Pe măsură ce tehnologia va fi rafinată, Toyota intenționează să reducă semnificativ această distanță, făcând sistemul mai practic pentru utilizarea în traficul real.

Funcționare autonomă: Tot procesul de urmărire se desfășoară fără intervenție umană în vehiculul din spate, bazându-se exclusiv pe senzorii și sistemele de control autonom.
Aplicații practice ale tehnologiei
După ani de cercetare și investiții masive în tehnologii autonome, vehiculele self-driving încep să devină realitate. Toyota își propune să aducă această tehnologie pe piață înaintea competitorilor, vizând mai multe scenarii de utilizare:
Deplasări în convoi
Imaginați-vă un grup de cinci mașini care pleacă împreună la mare. În loc ca fiecare șofer să conducă individual, doar conducătorul din mașina din față ar conduce activ, iar celelalte patru vehicule ar urma automat, menținând distanța și traiectoria corectă.
Utilizare pe autostrăzi
Pe porțiunile de autostradă, unde condițiile de drum sunt mai previzibile, această tehnologie ar putea fi extrem de utilă, permițând:

- Reducerea oboselii șoferilor în călătorii lungi
- Menținerea constantă a distanței de siguranță
- Optimizarea consumului de carburant prin deplasarea în convoi
Potențialul de siguranță
Deși conceptul este încă în stadiu incipient, adoptarea pe scară largă a acestei tehnologii ar putea contribui semnificativ la:
- Scăderea numărului de accidente rutiere
- Reducerea erorilor umane în trafic
- Îmbunătățirea fluxului de trafic pe arterele principale
Comparație cu tehnologiile existente
Sistemele ACC actuale
Multe mașini moderne sunt deja echipate cu sisteme de frânare automată la coliziune. De exemplu, sistemul ACC de la Volkswagen permite setarea senzorilor pentru a urmări mașina din față, menținând automat o distanță de siguranță.
Diferențele cheie
Sistemul Toyota se diferențiază prin:
- Replicare completă a mișcărilor: Spre deosebire de ACC-ul tradițional care doar menține distanța, sistemul Toyota copiază integral mișcările vehiculului lider
- Urmărire în viraje: Tehnologia permite urmărirea precisă chiar și atunci când mașina din față virează, nu doar în mers drept
- Funcționalitate extinsă: Include mai multe capabilități autonome decât sistemele convenționale de asistență la condus
Provocări și întrebări deschise
Orice tehnologie nouă ridică întrebări importante despre implementarea și impactul ei:
Siguranța sistemului
- Cum va reacționa sistemul în condiții meteorologice adverse?
- Ce se întâmplă dacă conexiunea între vehicule este întreruptă?
- Cât de fiabile sunt senzorii în diferite scenarii de trafic?
Aspecte legale și de reglementare
- Ce cadru legislativ va fi necesar pentru utilizarea acestei tehnologii?
- Cine este responsabil în caz de accident - conducătorul vehiculului lider sau producătorul sistemului?
- Cum vor fi reglementate deplasările în convoi pe drumurile publice?
Impactul social și economic
- Cum va schimba această tehnologie industria transporturilor?
- Va reduce nevoia de șoferi profesioniști în anumite sectoare?
- Care va fi impactul asupra siguranței rutiere la nivel global?
Perspectivele viitorului
Deși sistemul de tractare fără cârlig al Toyota este încă în faza de dezvoltare, potențialul său este semnificativ. Tehnologia reprezintă un pas important către viitorul conducerii autonome și ar putea revoluționa modul în care ne deplasăm, mai ales în călătoriile lungi sau în transportul de mărfuri.
Peste câțiva ani, când tehnologia va fi perfecționată și testată extensiv, am putea vedea primele implementări comerciale. Până atunci, Toyota continuă să rafineze sistemul, adresând provocările tehnice și de siguranță pentru a asigura o tranziție sigură către această nouă eră a mobilității.